Human-Robot Teamwork in Manufacturing

In current manufacturing environments, robots are often used only for highly repetitive tasks that have little-to-no variation in behavior. A common example is a welding robot in an automobile assembly line, illustrated above at left. Humans are not allowed near these large and dangerous robots since they do not have the necessary sensing to behave safety around people.
However, mass-production assembly line techniques are not always feasible (see the airplane environment, above at right). In these sorts of settings, we envision a future in which robots and humans work collaboratively as a team in factories. Robots working in these settings must:
-
Be able to communicate clearly and intelligently with humans
-
Be easy and intuitive to work with
-
Be able to respond to unexpected disturbances that may occur
We are researching various methods towards these goals, including continuous planning and execution, execution monitoring, and planning with sensing actions.
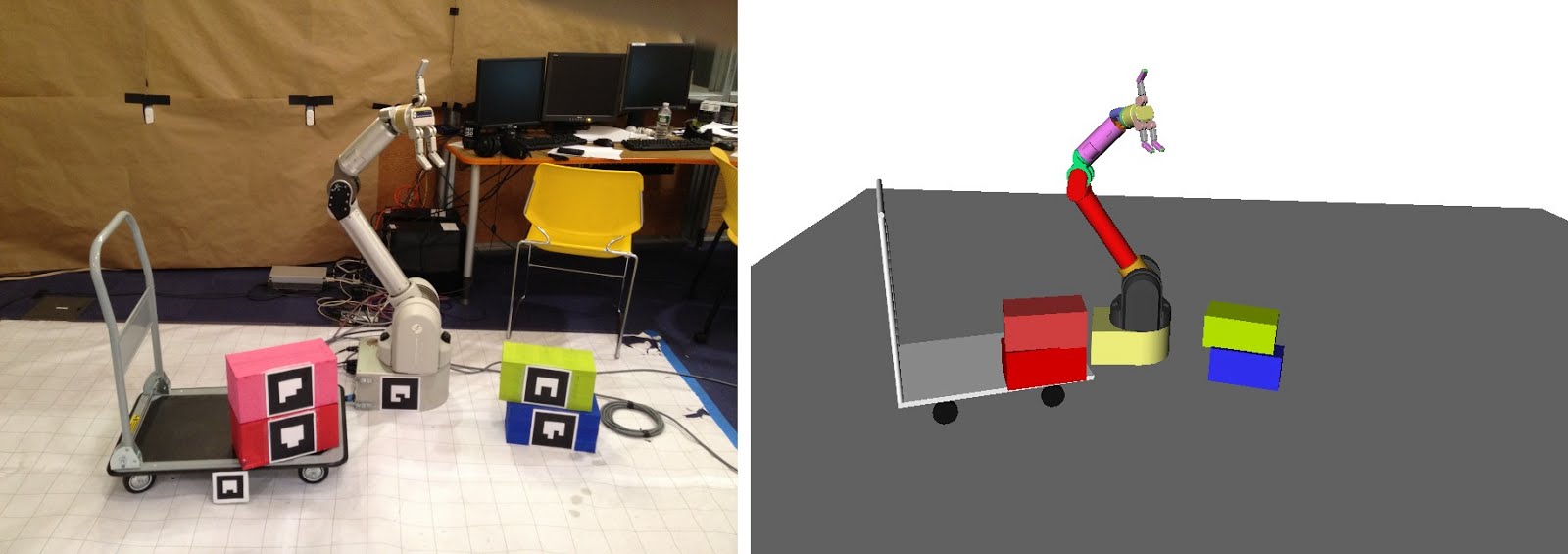
The previous version of our test bed featured (in simulation and in hardware) a collaborative manufacturing robot. Our voice-operated robot was capable of manufacturing stacks of blocks and putting them on a cart. A human user could go up to the robot and ask for certain stacks of blocks to be made. If the robot was disturbed while working – either harmfully by messing up the partially-complete stack of blocks or beneficially by taking the robot closer to its goal – the robot would immediately notice it, explain what the change was, why it was important, and then proceed to come up with a new plan to address the disturbance (ex., picking up a fallen block).
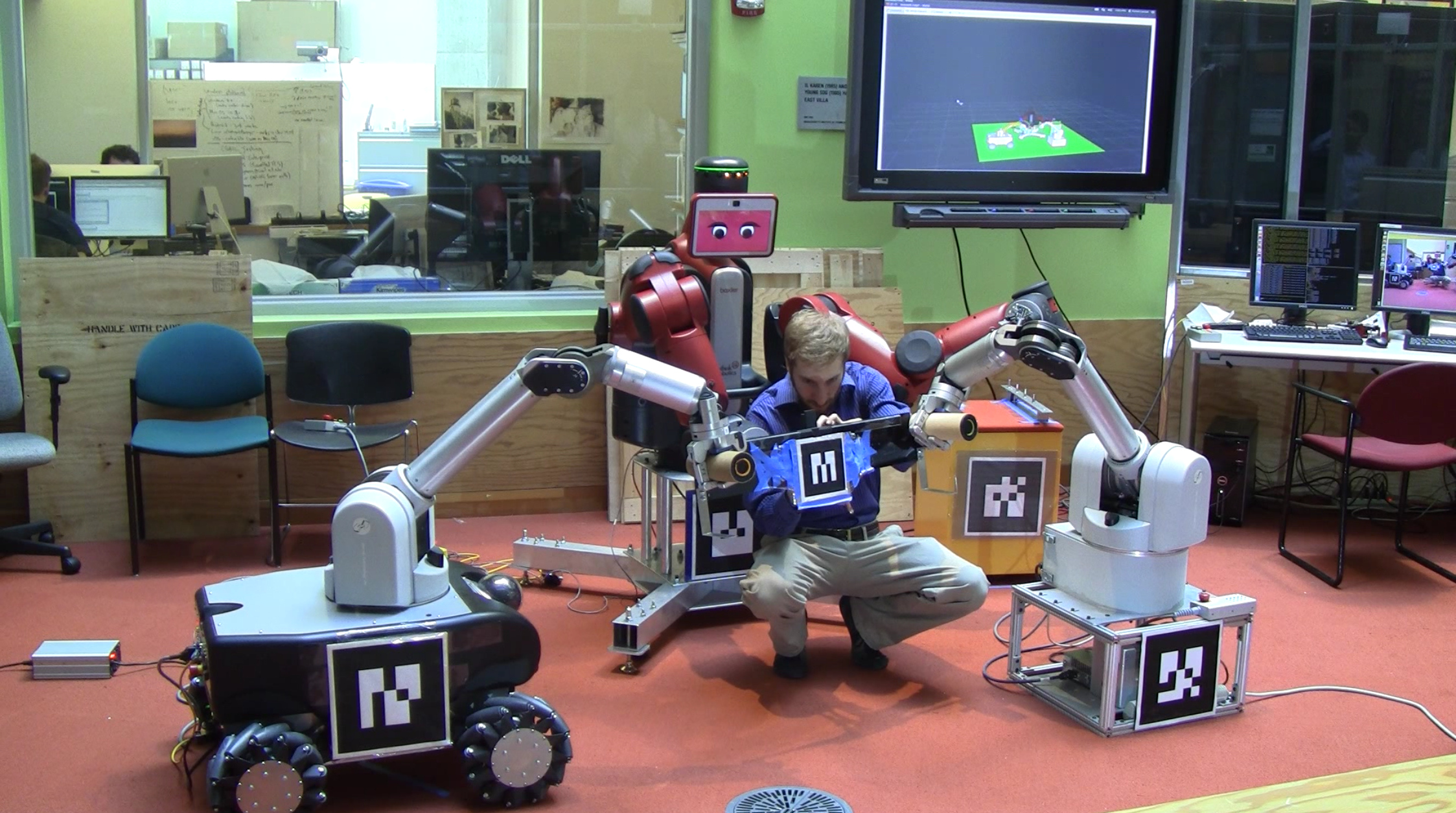
In its current incarnation, our test bed features two WAM arms and a Baxter that can work collaboratively with humans in order to complete a mock wing-riveting task.
This work is generously funded by the Boeing Company grant MIT-BA-GTA-1.